
电气元件认识
在非标自动化上位机开发与电控系统设计中,电气元件的物理选型、工作原理、接线规范以及通信调试是保障整机稳定性的关键。如果上位机软件工程师不了解底层电气接线和传感器原理,在遇到信号误报、通信丢包或原点回零异常时,往往无从下手。
本文以一套石墨盘自动装卸整机项目的真实 BOM 清单为核心,系统性拆解整机电气架构。图文并茂地解析总线通信模块、精密电机、相机视觉、扫码枪、各类传感器以及现场接线配件的工作原理、接线电路与调试要点。
目录
一、控制系统与通信总线
在中大型自动化整机中,为了避免复杂繁琐的现场布线,多轴系统与分布式 IO 模块多采用工业总线进行通信与数据交互。
1.1 SMEMA 信号转接隔离模块 — 灵猴 LH-SMEMA-SCM-GI-12CH
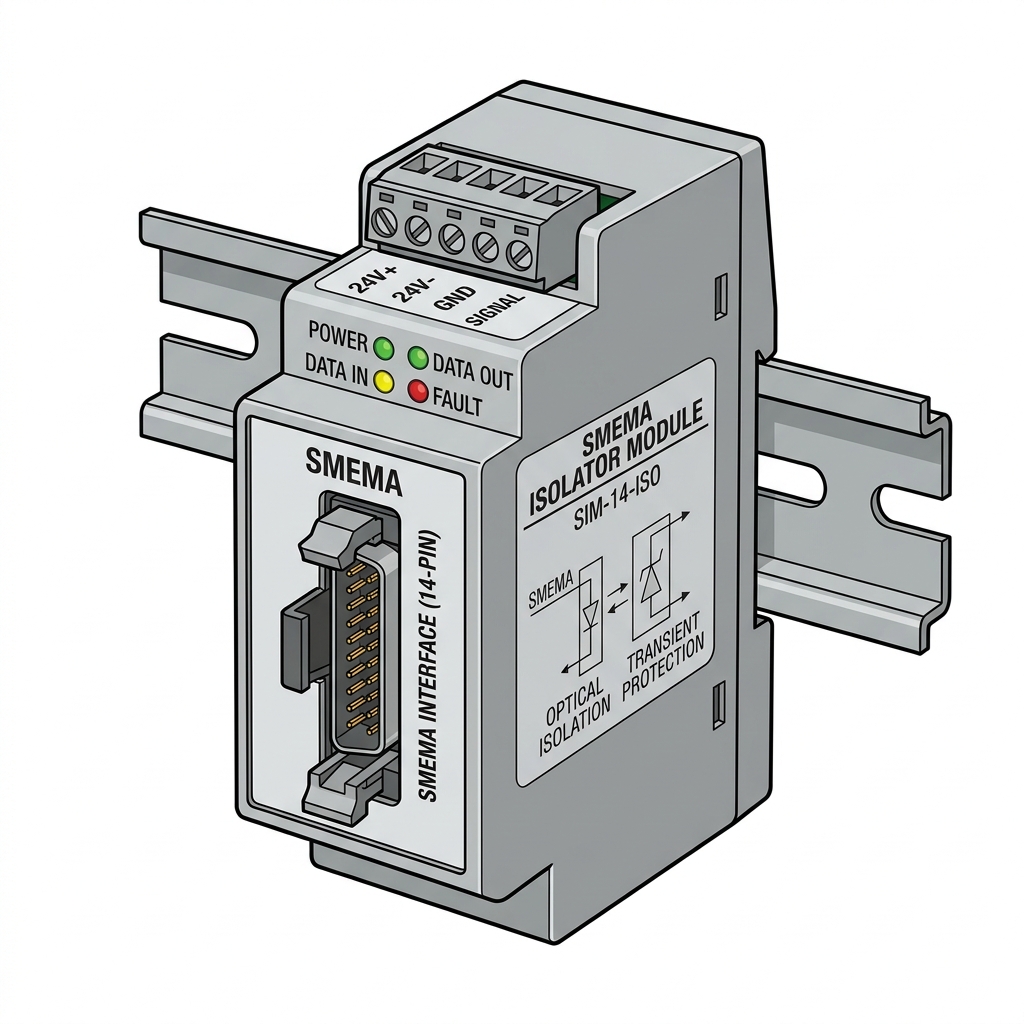
1. 工作原理与物理隔离
SMEMA (Surface Mount Equipment Manufacturers Association) 标准定义了表面贴装设备之间传送 PCB 载具时的电气接口与握手规范。主要依靠两路信号线进行控制:
- Ready (已准备就绪):本设备有板/托盘可以送出。
- Busy (正忙):下游设备正忙,无法接收。
非标流水线中,上游设备与下游设备的控制系统通常由不同厂家提供,其直流电源系统绝不能共地(存在电势差)。灵猴的 LH-SMEMA-SCM-GI-12CH 模块利用内部的光电耦合器进行物理隔离,将电信号转换为光信号再还原,确保两端设备即便有电势差,也不会烧毁内部电路。
2. 隔离转换接线原理
上游设备 (发送端) 隔离转换模块 (LH) 本设备 (接收端) ┌─────────────────┐ ┌─────────────────────┐ ┌───────────────┐ │ [Ready Out 继电器]│ │ │ │ │ │ Pin 1 (输出+) ├──────────────────────────►│ IN+ │ │ │ │ Pin 2 (输出-) ├──────────────────────────►│ IN- (内部光耦输入) │ │ │ │ │ │ │ │ │ │ │ │ OUT+ (内部光耦输出) ├────────────────►│ PLC / 控制卡 DI│ │ │ │ OUT- ├────────────────►│ 0V GND │ └─────────────────┘ └─────────────────────┘ └───────────────┘3. 调试要点
- 常开与常闭逻辑:SMEMA 规范中,Ready 和 Busy 触点在正常传输时通常设计为常开 (NO),接线时需仔细核对线缆 Pin 脚定义,防止逻辑反转导致整线停机。
1.2 本地 IO 扩展模块 — 固高 HCB5-1616-DTD01
1. 工作原理
固高 HCB5-1616-DTD01 本地扩展 IO 模块挂载在多轴运动控制卡的本地总线上,用于实现本地开关信号的硬件级就近采集。它提供 16 路数字输入和 16 路数字输出,有效降低主控周期的数据总线占用率。
2. NPN型接线图
外部 NPN 开关/传感器 固高 HCB5 模块输入端 ┌──────────────────────┐ ┌───────────────────────────┐ │ +24V 电源线 (棕) ├─────────────────────►│ V+ (模块 24V 输入端) │ │ 信号输出线 (黑) ├─────────────────────►│ INx (数字输入通道) │ │ 0V 地线 (蓝) ├──────────┬──────────►│ COM (公共端,接 0V) │ └──────────────────────┘ │ └───────────────────────────┘ 外部直流开关电源 0V ────────────────┘3. 极性与硬件调试
该模块提供 NPN (SINK) 与 PNP (SOURCE) 极性切换端子。调试时必须根据接入的传感器输出极性进行拨码或接线对应,极性接错会导致模块指示灯无响应。
(注:由于无固高品牌的高吻合度图片,此处不配置配图。)
1.3 远程总线 IO 模块 — 灵猴 LHS3 系列 EtherCAT 模块

1. 分布式 IO 控制机制
远程 IO 模块是现场传感器与主控系统之间的桥梁。它通过高速 EtherCAT 工业以太网 与工控机/PLC进行周期性过程数据通信(通信周期通常为 1ms 以内)。模块直接安装在工站下方,实现“就近接线、网线总线传输”。
2. 本项目中的模块选型与信号映射
在本项目中,三种规格的灵猴总线模块分别分布在不同组件中:
- LHS3-3200-XET1 (32路输入,共1个):
- 安装位置:交错上料组件。
- 接入信号:集中接收该工站的 17 个 EX-14A 传感器、4 个 PM-Y45 限位/原点以及气缸磁性开关。
- LHS3-1616-XET1 (16输入/16输出,共3个):
- 安装位置:中转搬运轴 (1个)、定位移栽轴 (1个)、下料搬运轴 (1个)。
- 接入信号:输入主要接 PM-Y45 行程光电,输出主要控制 ZK2-25EA-A 真空阀及气阀。
- LHS3-2408-XET1 (24输入/8输出,共4个):
- 安装位置:下料翻转 (1个)、流线1 (1个)、流线2 (1个)、流线3 (1个)。
- 接入信号:输入主要接收流线的对射式光电及磁性传感器,输出控制输送带滚轴电机的启停与换向。
3. 手拉手串联调试要点
所有的 LHS3 模块带有两个 RJ45 总线网口(ECAT IN 和 ECAT OUT),必须遵循菊花链(Daisy Chain)串行连接:
[主控总线网口] ──► [LHS3-3200 IN] ──► [LHS3-3200 OUT] ──► [LHS3-1616 IN] ──► [LHS3-1616 OUT] ──► ...在强干扰区必须使用超五类(CAT5e)或六类(CAT6)带屏蔽的双绞线(SFTP),且屏蔽层必须单端接地,防止伺服电机的高频谐波干扰总线通信。
1.4 PLC 扩展模块 — 汇川系列
1. 工作原理与通信分工
汇川 PLC 扩展模块挂载在下位机 PLC 控制系统上,用于实现工站级安全联锁、气缸动作顺序逻辑控制以及模拟量输入等本地高速逻辑处理。它与上位机或远程 IO 系统的区别在于它受 PLC 中央处理单元的高频扫描控制,保障了逻辑执行的强实时性。
2. 调试要点
- 输入输出点配置:在 PLC 硬件组态中配置扩展模块的起始 I/O 地址。
- 安全联锁:当上位机由于软件异常暂停时,PLC 通过扩展模块直接检测硬急停回路状态,并切断关键气阀的电源,保障现场机械安全。
(注:由于无匹配的汇川PLC扩展模块图片,此处不配置配图。)
二、动力与气动执行机构
动力与执行机构是上位机控制指令的物理落脚点,负责驱动各搬运轴的高速定位与取放料动作。
2.1 精密直线电机 — 灵猴 BPMC06050A1C2
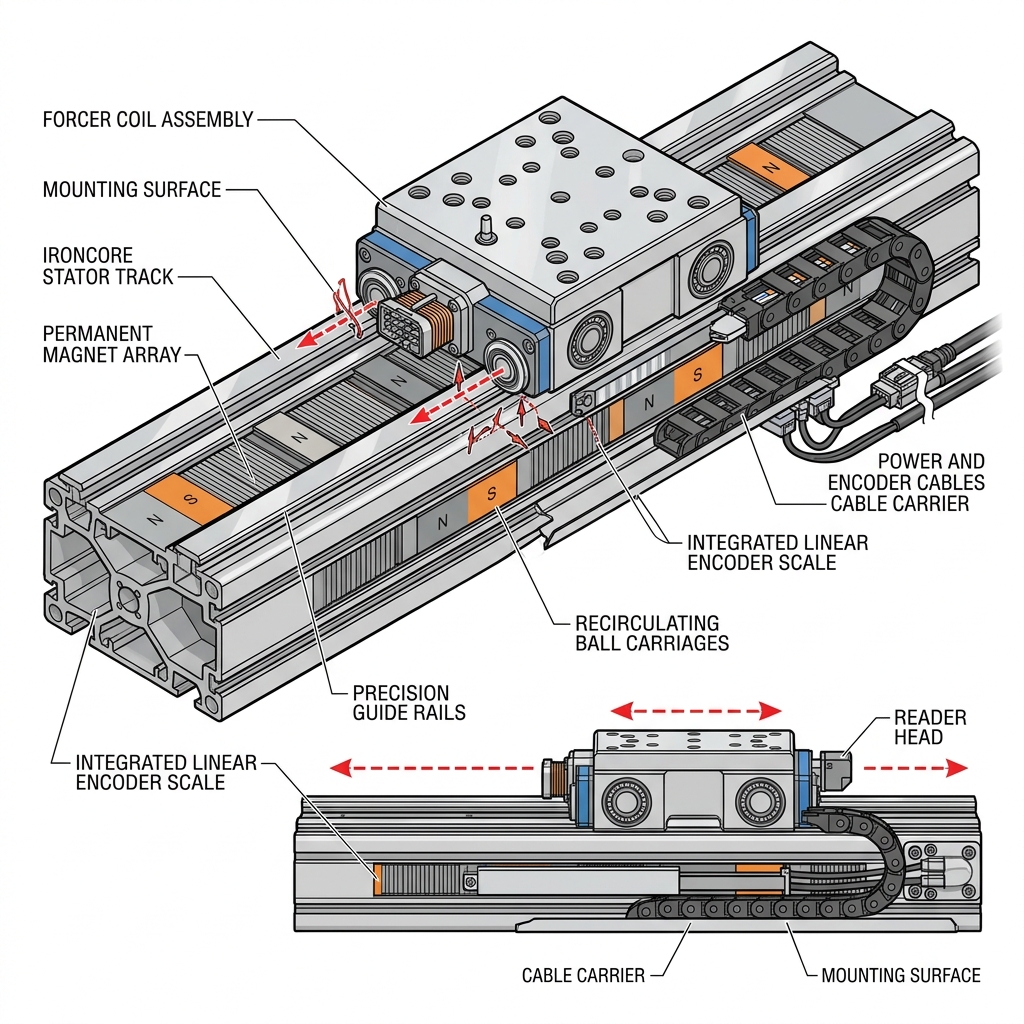
1. 直线驱动工作原理
直线电机(Linear Motor)将电能直接转换为直线往复运动。它取消了伺服电机+同步带/滚珠丝杠等机械转换机构:
- 定子:铺设在动轨底座上的强力永磁磁条。
- 动子:内部带有三相电磁绕组的滑块。 由于无机械磨损和物理间隙,配合滑台上反馈分辨率为 0.1μm 的光栅尺,可实现高响应、高精度的闭环位置控制。
2. 直线电机控制架构
[主控卡/驱动器] ◄─── (光栅尺差分反馈) ───► [直线电机动子滑块] │ (UVW 三相电流) ▼ [定子永磁轨道]3. 项目实战分布
- 交错上料 Y1/Y2 轴 (2个):双直线轴高速交错运行,实现石墨盘的平稳喂料。
- 中转搬运 Y 轴 (1个) & 下料搬运 Y 轴 (2个):采用灵猴 BPMC06050A1C2 直线电机,用于中行程/长行程的高频往复平移。
2.2 交流伺服电机与驱动器 — 汇川 MS1H4-20B30CB / IS810N

1. 系统工作原理
汇川交流伺服驱动器(IS810N 系列)通过三相正弦波交流电驱动 MS1H4-20B30CB 伺服电机转子。电机尾部带有的高分辨率多圈绝对值编码器,将转子实际旋转位置和转速反馈给伺服驱动器,实现高响应的位置、速度与力矩闭环控制。
2. 项目中的伺服轴分布
本整机项目中,伺服轴多用于旋转控制和精密升降:
- 上料摆正 Y1 轴 (1个):驱动摆正滑台对进料石墨盘进行机械微调对齐。
- 中转搬运轴 (1个) & 下料搬运轴 (3个):包含中转/下料的 Z 轴(升降)、X 轴(短横移)以及下料的 R 轴(旋转)。
- 定位移栽轴 (1个) & 下料翻转轴 (1个):用于滑台的水平位移与 180 度翻转控制。
3. 驱动器与滤波器接线
三相电源输入 ──► 滤波器 ──► 汇川 IS810N 驱动器 (R/S/T) │ ├──► 电机动力线 (U/V/W) ──► 伺服电机 └──► 编码器反馈线 ◄────────┘2.3 无刷直流减速电机 — 中大力德 25KLD120-220GK-28S
1. 工作原理与无级调速
中大力德 25KLD120-220GK-28S 属于集成一体化调速的无刷直流减速电机。内部利用电子换向器代替机械换向器,极大减小了电刷磨损带来的粉尘与噪声。搭配减速比为 28 的减速箱,可实现低速大扭矩输出,适合流线的平稳传送。
2. 应用场景
- 流线 1/2/3 的输送驱动 (3个):分别安装在三条传送线体(流线1、流线2、回流流线3)的端部,作为驱动皮带/滚线的恒速动力源,通过远程 IO 模块 LHS3-2408 输出电平逻辑,控制其启动、停止与故障报警监测。
(注:由于无中大力德品牌的高吻合度图片,此处不配置配图。)
2.4 真空一体阀与电磁阀岛 — SMC ZK2-25EA-A / EMC 亿太诺
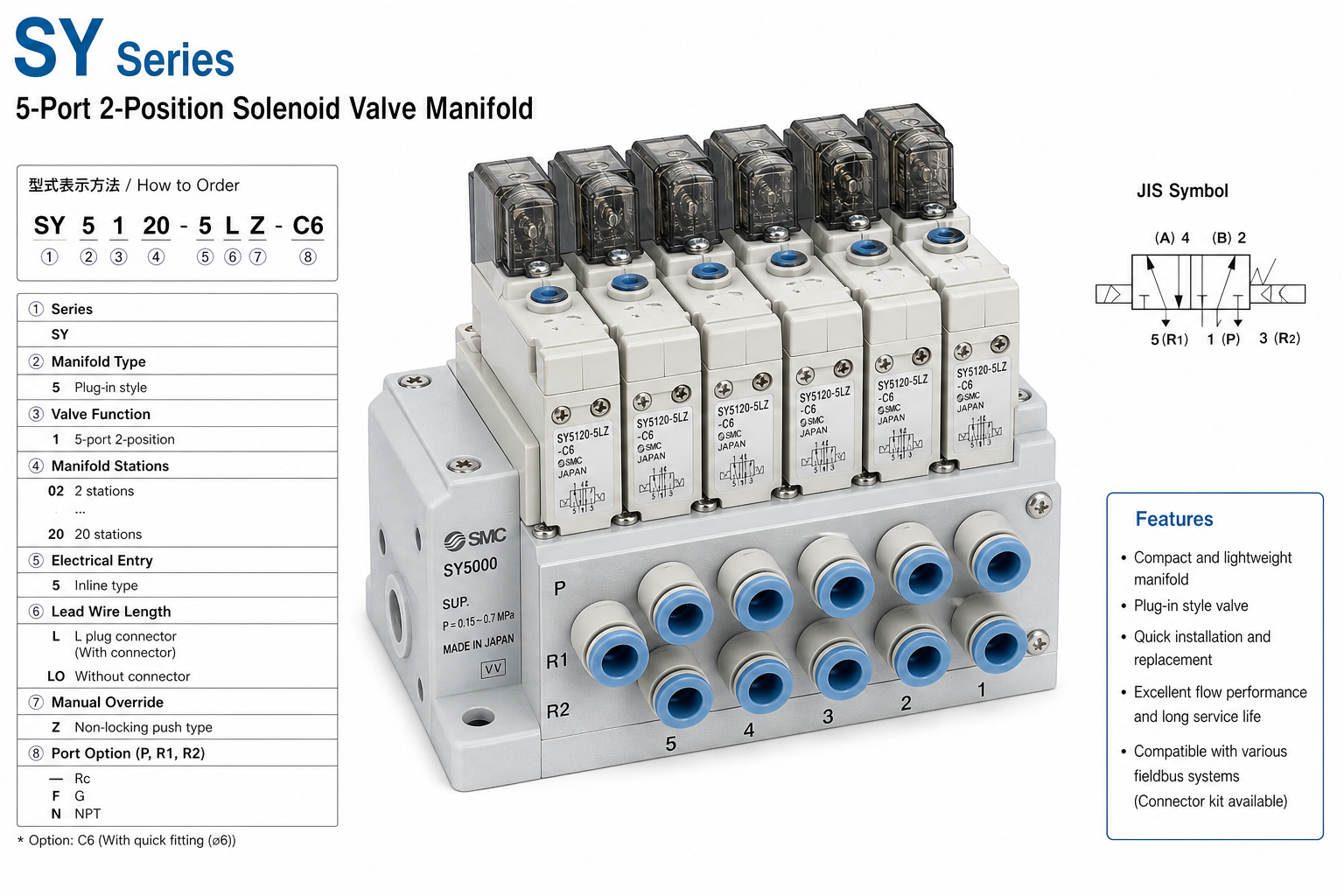
1. 负压吸附工作原理
- SMC ZK2-25EA-A 真空一体阀:利用文丘里(Venturi)效应,通过高压压缩空气快速穿过狭窄管道在阀体内腔产生负压,从而吸起工件。它集成了空气供给阀、真空破坏阀、真空开关以及数字压力表,吸附响应速度低于 5ms。
- EMC 亿太诺总线阀岛 (4个):将多个气阀集成在统一的总线底座上,共用气源进出气口。上位机可通过 EtherCAT 总线直接控制阀岛各电磁阀的通断,驱动气缸伸缩。
2. 控制回路示意
[LHS3 输出 24V DC] ──► 供给阀通电 ──► 吸爪负压产生 ──► 真空表信号反馈 (≥-60kPa 判定吸起) [LHS3 输出 24V DC] ──► 破坏阀通电 ──► 气流强行吹出 ──► 快速物理剥离工件3. 现场调试要点
- 真空开关设定值:在 ZK2 阀体数显面板上将真空到达检测下限设定为
-60kPa。当传感器返回的高电平信号到达远程 IO 后,主控程序方可执行轴向搬运。
三、传感器与识别定位系统
传感器是上位机获取机械结构动作状态的硬件窗口,识别系统是保障物料正确流转的防错依据。
3.1 槽型光电传感器 — 松下 PM-Y45 / PM-T45

1. 重复定位精度与结构差异
PM-Y45 和 PM-T45 的槽宽固定为 5mm,其内部发光二极管与光敏三极管对置。当挡片(片厚 ≥ 1.0mm)插入槽内遮断红外光时,输出信号发生跳变。其物理重复精度可达 0.01mm。
- PM-Y45 (Y型垂直插片):最常用的限位与原点传感器,挡片以垂直方向插入槽体。
- PM-T45 (T型水平插片):适用于滑台侧边等空间摆正狭窄的结构,挡片以水平方向插入槽体。
2. 伺服/直线轴典型接线图
[松下 PM-Y45 / PM-T45 传感器] ┌────────────────────────────────┐ │ 棕 (24V) 蓝 (0V) 黑 (Signal)│ └───┬───────────┬──────────┬─────┘ │ │ │ ▼ ▼ ▼ ┌────────────────────────────────┐ │ V+ V- IN_Home │ │ 远程 IO 输入通道 │ └────────────────────────────────┘3. 项目中的位置分布
- PM-Y45 (共 27个):广泛分布于交错上料直线轴(4个)、气缸(4个)、中转搬运轴(4个)、下料搬运轴(7个)的正负极限与原点,作为滑台回零检测与过冲保护。
- PM-T45 (共 2个):专门用于下料搬运的旋转 R 轴(1个)和下料翻转的旋转 R 轴(1个)。
3.2 反射型与对射型光电传感器 — 松下 EX-14A / EX-13EA / EX-13EB
1. 工作原理的区别
- 松下 EX-14A:属于回归反射型 (Retroreflective)。发射与接收组件集成于传感器同一壳体内。光束射向对面的镜面反射板并返回,当物体阻断返回光时触发输出。
- 松下 EX-13EA/EB:属于对射型 (Through-beam),由独立的发射端 (Emitter) 与接收端 (Receiver) 组成。光轴对齐后,当物体经过并遮断两端对射光时触发输出。
2. 配图与接线
3. 项目实战应用位置
- EX-14A (共 26个):主要分布在交错上料组件(17个,用于盘体到位及石墨网格内物料有无判定)、定位移栽轴(2个)、流线2(6个,作气缸限位动作光电)、NG及配对组件(1个,检测有料)。
- EX-13EA (共 20个):分布于交错上料轨道(5个)、流线1(6个)、流线2(8个)及 NG 站(1个,检测到位),检测输送链板上的载具运动状态。
- EX-13EB (共 8个):安装于流线 3(回流线),作为托盘防夹、防叠以及回流段到位的逻辑信号输入。
3.3 气缸磁性传感器 — SMC D-M9B

1. 霍尔效应与两线制接线
SMC D-M9B 是两线制(2-Wire)固态磁性开关。它卡入气缸外壳的 T 型槽或 C 型槽中。当气缸活塞内部嵌有的永磁体移动到其下方时,磁开关内部的磁敏元件导通,输出高电平信号至输入模块。
2. 接线拓扑
气缸磁性开关 D-M9B ┌──────────────────────┐ │ 棕色线 ─────────────┼───► LHS3 远程 IO 数字输入通道 (INx) │ 蓝色线 ─────────────┼───► 0V GND └──────────────────────┘3. 应用分布
整机共包含 11 个 D-M9B 开关,分布于:
- 下料搬运轴 (4个) & 下料翻转 (2个):检测搬运爪水平气缸与翻转升降气缸的运动极限。
- 扫码夹持气缸 (1个) & 流线1顶升阻挡 (4个):用于夹紧和顶升状态的直接反馈。
3.4 工业扫码枪 — 康耐视 DM262_16MM-COV

1. 液态镜头与以太网传输
康耐视 DM262_16MM-COV 智能读码器集成了 16mm 液态镜头、高强度补光光源与 DSP 解码芯片。它支持自动快速对焦,通过 M12 以太网电缆将条码内容解析后通过 TCP/IP 直接传送给工控机上位机。
2. 调试难点与倾角调整
石墨盘通常采用激光雕刻的二维码,表面极易产生镜面反光。在设备装配时,扫码枪需呈 15° 倾角安装,避免漫反射偏振光直射镜头,同时在调试软件中开启“偏振过滤”算法,以保障极高的条码识读率。
四、工业视觉定位系统
机器视觉系统是设备的“眼睛”,为精密机械手臂的对中及对位抓取提供空间偏移坐标补偿。
4.1 上/下 CCD 视觉系统 — 凌云光相机 & RBM 光源

1. 硬件参数配置表
本项目的上、下 CCD 系统分别完成粗对准和精细极性检测:
| 系统工站 | 组件名称 | 规格型号/焦距 | 品牌 | 光学功能 |
|---|---|---|---|---|
| 上 CCD 系统 | 相机 | LY-U2000M-19 (网口) | 凌云光 | 2000万像素,用于石墨盘到位及大视野粗定位 |
| 镜头 | EG-FA25F-H (25mm) | 凌云光 | 25mm 定焦低几何畸变工业镜头 | |
| 光源 | RBM-SFLK600400Y50-W | RBM | 白色漫反射背光源,产生高对比度的盘体外轮廓 | |
| 下 CCD 系统 | 相机 | LY-U2500M-14 (网口) | 凌云光 | 2500万像素,高分率精细纠偏定位 |
| 镜头 | EG-FA35F-H (35mm) | 凌云光 | 35mm 精密定焦镜头,凸显微距细节特征 | |
| 光源 | RBM-FLK200200Y40-R | RBM | 红色环形光源,用以强化芯片引脚及极性刻字特征 |
2. 网卡优化注意事项
工业相机的 GigE 千兆网口直连工控机。由于图像数据流极高,上位机网卡配置中必须:
- 启用**巨帧(Jumbo Packet)**并设置其大小为
9014 字节。 - 关闭网卡节能选项,防止网卡处于低功耗模式引起视觉图像丢包。
五、配电与保护元件
配电与保护元件构成柜内直流控制电源及交流电机的电能保护屏障。
5.1 开关电源与电抗滤波器 — 德力西电源 / 汇川滤波器

1. 工作原理
- 德力西 24V DC 开关电源:将交流 AC 220V 电源转换为稳定的 24V DC 弱电电源,主要为远程 IO 模块及电磁阀组供电。
- 汇川直流电抗滤波器:串联在伺服驱动器 IS810N 输入前端,用于抑制高频换向引起的输入侧电网谐波干扰。
2. 接线分配
控制柜供电回路采用 3 个德力西开关电源,实现控制弱电与执行动力电物理分离:电源 1 为主控卡及传感器供电;电源 2 和 3 专门供电给真空阀和阻挡电磁阀。
5.2 空气开关 / 断路器 — 德力西

1. 热磁脱扣脱机机制
断路器(空气开关)负责整机动力母线及分支电源的短路和过载保护。德力西断路器具备热敏双金属片(用于过载保护)与电磁脱扣器(用于短路瞬时切断),可在几毫秒内熔断脱扣。
2. 柜内分级保护
柜内主进线 (32A) ──► 伺服驱动路断路器 (16A) ──► 驱动器输入 ──► 开关电源断路器 (6A) ──► 开关电源输入5.3 电磁继电器 — IDEC 和泉
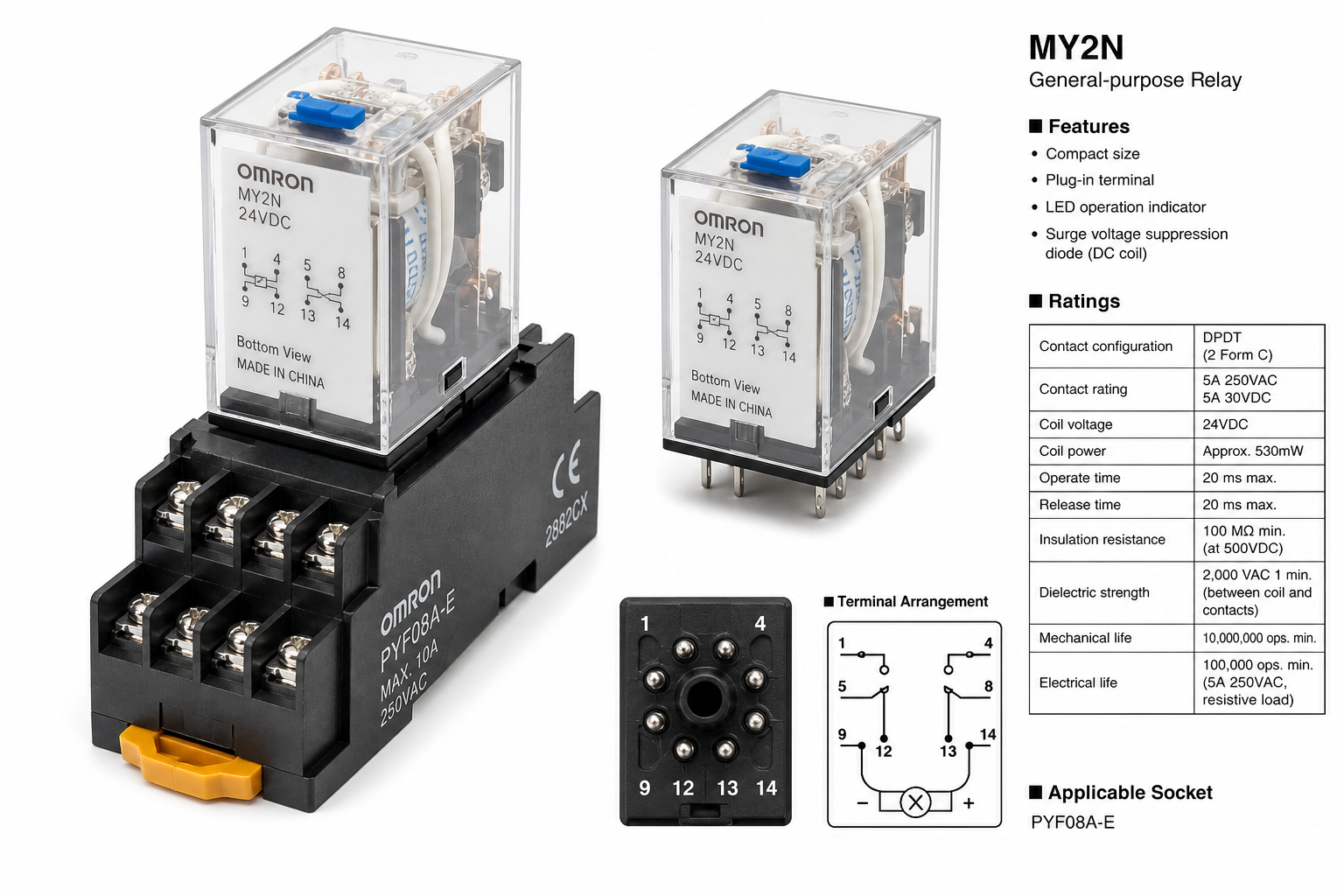
1. 电气中转与信号隔离
IDEC 电磁继电器采用低功耗 24V DC 电磁线圈,当线圈有电时,产生的电磁吸力使机械触点闭合,用于实现“小电流控制大电流”或弱电系统对 AC 220V 辅助设备(如排风扇、警报器)的电气隔离中转。
2. 接线规范
- 继电器底座上的 Pin 1 与 Pin 2 为线圈端子,引线两端需套清晰的线号管,并接旁路二极管,用以吸收线圈断电时产生的反向电动势,延长远程输出通道的寿命。
六、现场高效连接与走线规范
工业布线与拖链走线规范,是延长移动电缆物理弯曲寿命、削减电磁耦合干扰的基础保障。
6.1 8位集线分线接线盒 — 胜蓝电气 H450 系列
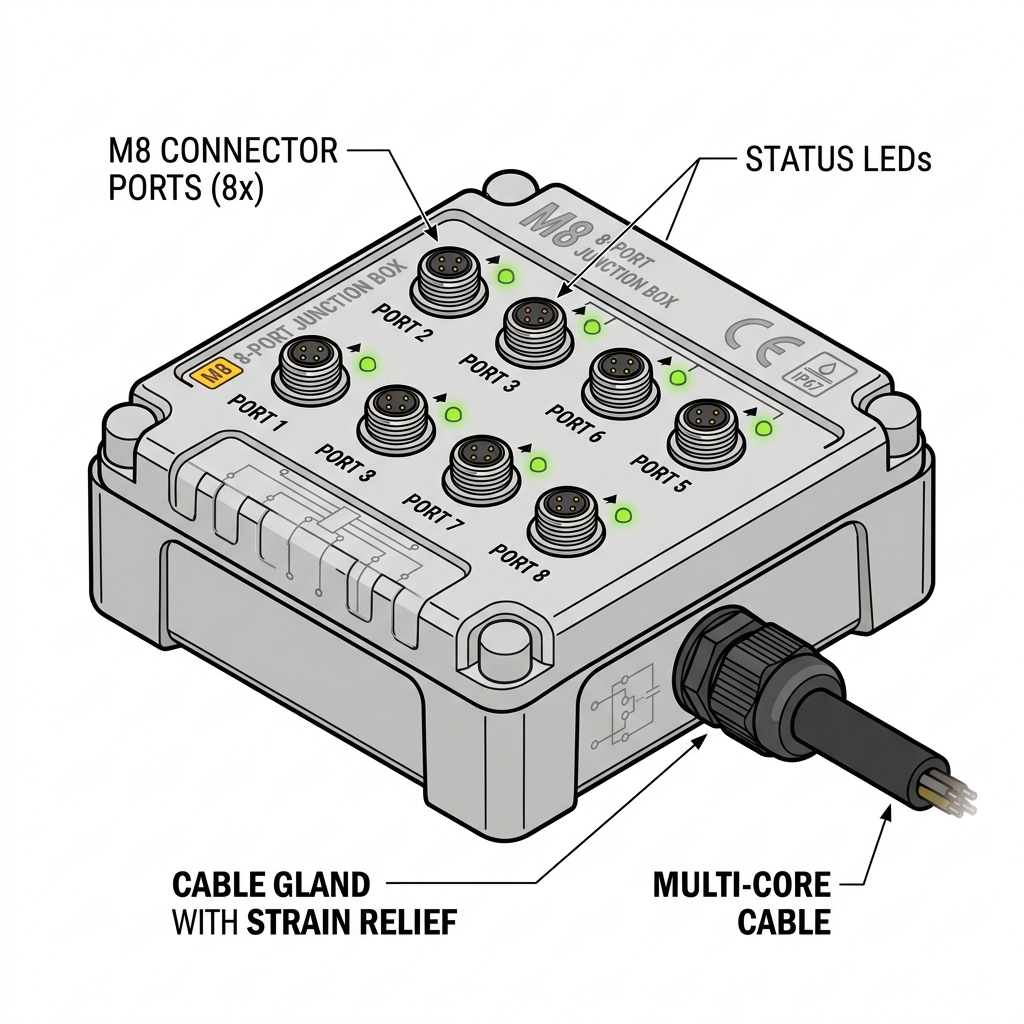
1. 坦克拖链中多线穿束的痛点与集线优势
在精密直线滑台(活动端)上通常布满 6~8 个槽型或反射型传感器。若为每个传感器单独引出电缆,会使得坦克拖链内部塞满,电缆在频繁弯曲中因剧烈摩擦而快速折断。 胜蓝电气 (SIRON) H450 8位分线盒彻底解决了此痛点:
- 所有传感器(带 M8 插头)直接插入安装在机构末端的接线盒端口中。
- 接线盒内部将 24V V+、0V GND 公共端子并联。
- 最终仅引出一根拖链高柔屏蔽电缆接入柜内的远程输入总线模块,从而将多根传感器线束简化为单根电缆。
2. 接线连接拓扑
[松下传感器 1 (M8)] ──► [Port 1] ──┐ [松下传感器 2 (M8)] ──► [Port 2] ──┼─► [H450接线盒] ──► (10芯高柔屏蔽线) ──► [LHS3 总线 IO 模块] ... │ [磁性传感器 8 (M8)] ──► [Port 8] ──┘3. 现场型号配置
- 交错上料直线轴:配置 4 个 H450-8TF-5000/200 接线盒(自带 5 米高柔拖链电缆)。
- 中转、定位、下料、流线各滑台:配置 16 个 H450-8-F 面板集线模块。
6.2 拖链与高柔性线缆 — 易格斯系列

1. 行程弯曲寿命与选型
设备在运行期间,拖链内电缆需随机械手滑台进行长期往复弯曲。因此,拖链弯曲半径(R)必须设置为电缆外径的 8~10倍,并且拖链内电缆总截面不得超过拖链内截面的 60%,确保其在拖链里拥有自然滑动与散热空间。
2. 强弱电分离屏蔽规范
为了防止伺服电机的高频脉冲动力电流耦合干扰敏感的传感器弱电信号,动力线与编码器线、通信线必须采用独立线槽或拖链物理分流隔板,其平行走线间距必须保持在 200mm 以上。
6.3 M12 连接器与端子排
1. M12 快速插座接线
M12 连接器具有螺纹锁固的紧凑防尘构造(IP67等级),是工业级高防护传感器的首选接口。
2. M12 A-Code 4 芯引脚引线规范
- Pin 1 (棕色线):接电源
24V DC正极。 - Pin 2 (白色线):接气缸/动作到位第二路输出(如有)。
- Pin 3 (蓝色线):接电源
0V GND负极。 - Pin 4 (黑色线):接主要数字量信号输出
OUT1。
3. 端子排电气连接与标号
柜内标准 DIN 导轨上安装弹簧插拔式端子排。剥线后套上热缩号码管,清晰标明每一支路接线去向(如 X1-02-LHS3-DI01),多股铜导线剥线后必须采用压线钳冷压 O 型或针型裸端子再接入,禁止将裸露铜丝直接插入端子。
七、整机电气选型速查总表
结合前文各章节所述,整理本整机项目中完整核心电气 BOM 选型参数,便于调试与物理核对:
| 安装部位 / 工站 | 元件类型 | 规格型号/核心参数 | 数量 | 单位 | 品牌 | 功能与去向说明 |
|---|---|---|---|---|---|---|
| 电控配盘 | SMEMA信号转接隔离模块 | LH-SMEMA-SCM-GI-12CH | 1 | PCS | Linkhou (灵猴) | 信号光电隔离,联接上下游设备流线 |
| IO扩展模块 | HCB5-1616-DTD01 | 2 | PCS | Googol (固高) | 扩展运动控制卡本地 I/O 点位 | |
| 直流电抗滤波器 | - | 3 | PCS | INOVANCE (汇川) | 抑制驱动器换向时引起的谐波干扰 | |
| 伺服驱动器 | IS810N | 8 | PCS | INOVANCE (汇川) | 驱动 7 个伺服轴电机及 1 个空备轴 | |
| 空气开关 | - | 7 | PCS | DELIXI (德力西) | 控制柜配电回路的过载与短路保护 | |
| 继电器 | - | 6 | PCS | 宝莹 | 强电信号中转与弱电信号隔离 | |
| 继电器 | - | 7 | PCS | IDEC (和泉) | 强电信号中转与弱电信号隔离 | |
| 电源 | - | 3 | PCS | DELIXI (德力西) | 提供 24V DC 柜内与工站控制弱电 | |
| 滤波器 | - | 2 | PCS | - | 电路输入端无线电射频噪声抑制 | |
| PLC扩展模块 | - | 1 | PCS | INOVANCE (汇川) | 下位机 PLC 本地本地总线 I/O 扩充 | |
| 交错上料组件 | 直线电机 | - | 2 | PCS | - | 双直线电机 Y1/Y2 交错平稳喂料 |
| 直线电机上的光电传感器 | PM-Y45 | 4 | PCS | Panasonic (松下) | Y1、Y2 直线滑台极限限位保护 | |
| 并排气缸的光电传感器 | PM-Y45 | 4 | PCS | Panasonic (松下) | 供给侧定位挡气缸到位信号采集 | |
| 反射型光电传感器 | EX-14A | 17 | PCS | Panasonic (松下) | 载具托盘与石墨网格有料/无料判断 | |
| 对射型光电传感器 | EX-13EA | 5 | PCS | Panasonic (松下) | 上料通道进料区托盘到位判定 | |
| M12的16位接线盒随线电缆线 | H450-8TF-5000/200 | 4 | PCS | SIRON (胜蓝电气) | 坦克拖链中 16 路传感器快速汇流接线 | |
| 远程输入IO模块 (32DI) | LHS3-3200-XET1 | 1 | PCS | Linkhou (灵猴) | 采集交错上料站全部开关量传感器信号 | |
| 上料摆正轴 | 伺服电机 | MS1H4-20B30CB | 1 | PCS | INOVANCE (汇川) | 石墨盘物料机械对齐摆正定位驱动 |
| 槽型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 摆正伺服滑台的行程极限与回零原点 | |
| 中转搬运轴 | 远程IO模块 (16I/16O) | LHS3-1616-XET1 | 1 | PCS | Linkhou (灵猴) | 中转工站电磁阀输出及开关量输入采集 |
| 直线电机 | BPMC06050A1C2 | 1 | PCS | Linkhou (灵猴) | 搬运主滑台的高频精密水平横移 | |
| 槽型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 搬运直线电机轴的正负极限安全开关 | |
| 伺服电机 | MS1H4-20B30CB | 1 | PCS | INOVANCE (汇川) | 控制搬运滑台的垂直 Z 轴升降 | |
| 槽型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 升降伺服 Z 轴的原点定位及极限开关 | |
| 真空一体阀 | ZK2-25EA-A | 4 | PCS | SMC | 机械手臂吸嘴吸附与吹气破坏控制 | |
| Mini型接线盒 | H450-8-F | 2 | PCS | SIRON (胜蓝电气) | 集中汇流并连活动末端的传感器引线 | |
| 定位移栽轴 | 伺服电机 | MS1H4-20B30CB | 1 | PCS | INOVANCE (汇川) | 驱动移栽轴滑台实现物料精准对中 |
| 槽型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 对中伺服滑台原点定位及限位 | |
| 真空一体阀 | ZK2-25EA-A | 2 | PCS | SMC | 吸附托盘定位移载控制 | |
| 远程IO模块 (16I/16O) | LHS3-1616-XET1 | 1 | PCS | Linkhou (灵猴) | 移载工站数字信号与气动阀控制 | |
| Mini型接线盒 | H450-8-F | 2 | PCS | SIRON (胜蓝电气) | 对中移栽机构活动末端集线盒 | |
| 反射型光电传感器 | EX-14A | 2 | PCS | Panasonic (松下) | 移载站物料阻挡到位检测 | |
| 下料搬运轴 | 远程IO模块 (16I/16O) | LHS3-1616-XET1 | 1 | PCS | Linkhou (灵猴) | 下料搬运组件分布式总线 IO 站 |
| Mini型接线盒 | H450-8-F | 2 | PCS | SIRON (胜蓝电气) | 机械搬运臂末端快速排线 | |
| 直线电机 | BPMC06050A1C2 | 2 | PCS | Linkhou (灵猴) | 下料搬运 Y1/Y2 双直线轴高速同步定位 | |
| 直线电机上的槽型传感器 | PM-Y45 | 4 | PCS | Panasonic (松下) | 双 Y 轴行程极限物理过冲防护 | |
| 真空一体阀 | ZK2-25EA-A | 4 | PCS | SMC | 下料滑台气吸爪的吸附操作 | |
| 伺服电机 | MS1H4-20B30CB | 3 | PCS | INOVANCE (汇川) | 驱动下料 X 轴、Z 轴升降以及 R 旋转轴 | |
| X, Z轴上的槽型光电传感器 | PM-Y45 | 3 | PCS | Panasonic (松下) | 行程原点与物理正负限位 | |
| 旋转轴上的槽型光电传感器 | PM-T45 | 1 | PCS | Panasonic (松下) | 下料旋转 R 轴的旋转原点传感器 | |
| 气缸磁性传感器(2线制) | D-M9B | 4 | PCS | SMC | 水平气缸气门状态伸长与缩回监测 | |
| 下料翻转 | 远程IO模块 (24I/8O) | LHS3-2408-XET1 | 1 | PCS | Linkhou (灵猴) | 下料翻转站气阀与限位传感器数据交互 |
| 伺服电机 | MS1H4-20B30CB | 1 | PCS | INOVANCE (汇川) | 驱动翻转 Z 轴升降与 180 度翻转轴 | |
| Z轴上的槽型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 升降 Z 轴原点及正负极限 | |
| R轴上的槽型光电传感器 | PM-T45 | 1 | PCS | Panasonic (松下) | 翻转旋转 R 轴旋转原点限位 | |
| Mini型分线接线盒 | H450-8-F | 2 | PCS | SIRON (胜蓝电气) | 翻转工位活动末端线束快速归拢 | |
| 真空一体阀 | ZK2-25EA-A | 2 | PCS | SMC | 夹爪气吸盘真空吸附 | |
| 气缸磁性传感器(2线制) | D-M9B | 2 | PCS | SMC | 垂直导向气缸行程到位控制 | |
| NG&配对 | 对射型光电传感器 | EX-13EA | 1 | PCS | Panasonic (松下) | NG 盒物理到位联锁判定 |
| 反射型光电传感器 | EX-14A | 1 | PCS | Panasonic (松下) | NG 盒内物料有无监控 | |
| 扫码组件 | 工业扫码枪 | DM262_16MM-COV | 2 | PCS | Cognex (康耐视) | 载具表面激光印刻二维码高速抓取解析 |
| 光源 | - | 1 | PCS | - | 提供稳定、无闪烁的条码解码补光 | |
| 气缸磁性传感器(2线制) | D-M9B | 1 | PCS | SMC | 扫码支架夹持气缸回缩限位 | |
| 流线1 | 远程IO模块 (24I/8O) | LHS3-2408-XET1 | 1 | PCS | Linkhou (灵猴) | 线体1段各阻挡与顶升开关信号总线采集 |
| 对射型光电传感器 | EX-13EA | 6 | PCS | Panasonic (松下) | 传送线体上载盘在各点位到位的检测 | |
| Mini型分线接线盒 | H450-8-F | 4 | PCS | SIRON (胜蓝电气) | 沿途 8 个传感器快速并线集线 | |
| U型光电传感器 | PM-Y45 | 2 | PCS | Panasonic (松下) | 顶升/阻挡气缸限位,辅助气阀动作 | |
| 气缸磁性传感器(磁黄) | D-M9B | 4 | PCS | SMC | 电磁阻挡挡销气缸到位磁开关 | |
| 无刷直流减速电机 | 25KLD120-220GK-28S | 1 | PCS | ZD Motor (中大力德) | 线体 1 段输送滚线连续运转动力 | |
| 流线2 | 远程IO模块 (24I/8O) | LHS3-2408-XET1 | 1 | PCS | Linkhou (灵猴) | 线体2段电磁阀驱动与状态信号总线控制 |
| 对射型光电传感器 | EX-13EA | 8 | PCS | Panasonic (松下) | 检测传送载具在移载过程中的安全防夹 | |
| 槽型光电传感器 (listed as EX-14A) | EX-14A | 6 | PCS | Panasonic (松下) | 流线 2 气缸动作限位光电传感器 | |
| 无刷直流减速电机 | 25KLD120-220GK-28S | 1 | PCS | ZD Motor (中大力德) | 线体 2 段输送滚线连续运转动力 | |
| 流线3 | 远程IO模块 (24I/8O) | LHS3-2408-XET1 | 1 | PCS | Linkhou (灵猴) | 流线3回流段过程数据周期采集 |
| 对射型光电传感器 | EX-13EB | 8 | PCS | Panasonic (松下) | 回流段托盘防叠板及到位状态判断 | |
| 无刷直流减速电机 | 25KLD120-220GK-28S | 1 | PCS | ZD Motor (中大力德) | 线体 3 回流段输送滚线连续运转动力 | |
| CCD视觉组件 (CCD 1) | 上CCD相机 | LY-U2000M-19 | 1 | PCS | LUSTER (凌云光) | 采集石墨盘正面对准图像,2000万像素 |
| 上CCD镜头 | EG-FA25F-H | 1 | PCS | LUSTER (凌云光) | 25mm 焦距工业定焦,低畸变对位镜头 | |
| 上CCD光源 | RBM-SFLK600400Y50-W | 1 | PCS | RBM | 底部背光源,呈现石墨盘外轮廓阴影 | |
| 下CCD相机 | LY-U2500M-14 | 1 | PCS | LUSTER (凌云光) | 采集底部对中芯片图像,2500万像素 | |
| 下CCD镜头 | EG-FA35F-H | 1 | PCS | LUSTER (凌云光) | 35mm 焦距工业微距,高分辨率镜头 | |
| 下CCD光源 | RBM-FLK200200Y40-R | 1 | PCS | RBM | 红色环形光源,高对比呈现引脚极性特征 | |
| 辅助执行 | 总线式阀岛 | - | 4 | PCS | EMC (亿太诺) | 电磁汇流排,控制气路系统集中换向动作 |
(本文由上位机软件开发与现场电控硬件工程师联合编制归档。整机 BOM 硬件的品牌与技术选型规格,可直接用于多轴运动控制及分布式控制网络的应用开发设计参考。)